
เครื่องมือวัดความเร็วรอบ (Tachometer) เป็นเครื่องมือหรืออุปกรณ์ที่ใช้ในการวัดและแสดงความเร็วในการหมุนหรือรอบต่อนาที (RPM) ของวัตถุที่กำลังหมุน โดยทั่วไปจะใช้ในอุตสาหกรรมและการใช้งานต่างๆ ซึ่งการรู้ความเร็วของการหมุนเป็นสิ่งสำคัญสำหรับการตรวจสอบและควบคุมเครื่องจักร เครื่องยนต์ มอเตอร์ และส่วนประกอบอื่นๆ ที่หมุน
คำว่า “tachometer” มาจากคำภาษากรีก “tachos” (หมายถึงความเร็ว) และ “metron” (หมายถึงการวัด) เครื่องวัดความเร็วรอบเป็นเครื่องมือที่ทรงคุณค่าในด้านยานยนต์ การบิน การเดินเรือ อุตสาหกรรม และวิทยาศาสตร์ โดยให้ข้อมูลป้อนกลับตามเวลาจริงเกี่ยวกับความเร็วในการหมุนของวัตถุที่กำลังวัด
เครื่องวัดรอบมีหลายประเภทเช่นอะนาล็อกและดิจิตอล และยังมีชนิดแบบสัมผัส (Contact) หรือไม่สัมผัส (Non Contact) ก็ได้ ขึ้นอยู่กับกลไกการตรวจจับที่ใช้ในการวัด RPM
เครื่องวัดรอบมีบทบาทสำคัญในการรับประกันว่าเครื่องจักรจะทำงานด้วยความเร็วที่ต้องการเพื่อประสิทธิภาพและความปลอดภัยสูงสุด โดยรวมแล้วเป็นอุปกรณ์สำคัญที่ช่วยให้ผู้ใช้สามารถวัดและตรวจสอบความเร็วในการหมุนได้อย่างแม่นยำ ช่วยให้การทำงานและประสิทธิภาพของระบบกลไกและการใช้งานต่างๆ เป็นไปอย่างราบรื่น

หลักการทํางาน Tachometer
หลักการทำงานของเครื่องวัดรอบจะขึ้นอยู่กับการวัดความเร็วรอบหรือ RPM (รอบต่อนาที) ของวัตถุที่กำลังหมุน เครื่องวัดความเร็วรอบใช้วิธีการตรวจจับที่แตกต่างกันขึ้นอยู่กับประเภทของเครื่องวัดความเร็วรอบ เช่น เครื่องวัดความเร็วรอบแบบอนาล็อก ดิจิตอล แบบสัมผัส หรือแบบไม่สัมผัส ต่อไปนี้เป็นภาพรวมทั่วไปเกี่ยวกับหลักการทำงานของมาตรวัดรอบประเภทต่างๆ :
1. เครื่องวัดรอบแบบไม่สัมผัส (เครื่องวัดความเร็วรอบแบบออปติคอล/เลเซอร์):
เครื่องวัดความเร็วรอบแบบไม่สัมผัส (Non Contact Tachometer) ใช้เทคโนโลยีที่ใช้แสงเช่น เซ็นเซอร์ออปติคอลหรือเลเซอร์ เพื่อวัด RPM โดยไม่ต้องสัมผัสกับวัตถุที่กำลังหมุน
เครื่องวัดจะฉายแสงไปยังพื้นผิวสะท้อนแสงบนวัตถุที่กำลังหมุน แสงจะสะท้อนกลับไปที่เซ็นเซอร์ของมาตรวัดความเร็วรอบ โดยจะคำนวณความเร็วในการหมุนของอุปกรณ์โดยการวัดช่วงเวลาระหว่างพัลส์ที่เข้ามา
มาตรวัดความเร็วรอบจะคำนวณ RPM ตามเวลาที่แสงใช้ในการเดินทางไปและกลับ จากนั้นค่า RPM จะแสดงบนหน้าจอดิจิตอลของมาตรวัดรอบ
เครื่องวัดนี้เหมาะอย่างยิ่งสำหรับการวัดความเร็วต่ำด้วยความแม่นยำสูง เวลาในการอ่านของเครื่องวัดรอบนี้ขึ้นอยู่กับความเร็วในการหมุน แต่ความละเอียดจะขึ้นอยู่กับความเร็วในการหมุน

2. เครื่องวัดรอบแบบสัมผัส (Contact tachometer):
เครื่องวัดความเร็วรอบแบบสัมผัส (Contact type) ใช้การสัมผัสทางกายภาพกับวัตถุที่กำลังหมุนเพื่อวัด RPM เครื่องวัดประกอบด้วยเซนเซอร์หรือโพรบเช่น เซนเซอร์แบบเหนี่ยวนำหรือแม่เหล็ก ซึ่งจะสัมผัสโดยตรงกับเพลาหมุนหรือพื้นผิว
เซ็นเซอร์ตรวจจับการหมุนและส่งสัญญาณไปยังมาตรวัดความเร็วรอบ ซึ่งจะคำนวณ RPM และแสดงผลบนจอแสดงผลแบบอะนาล็อกหรือดิจิตอล


ความแม่นยำ
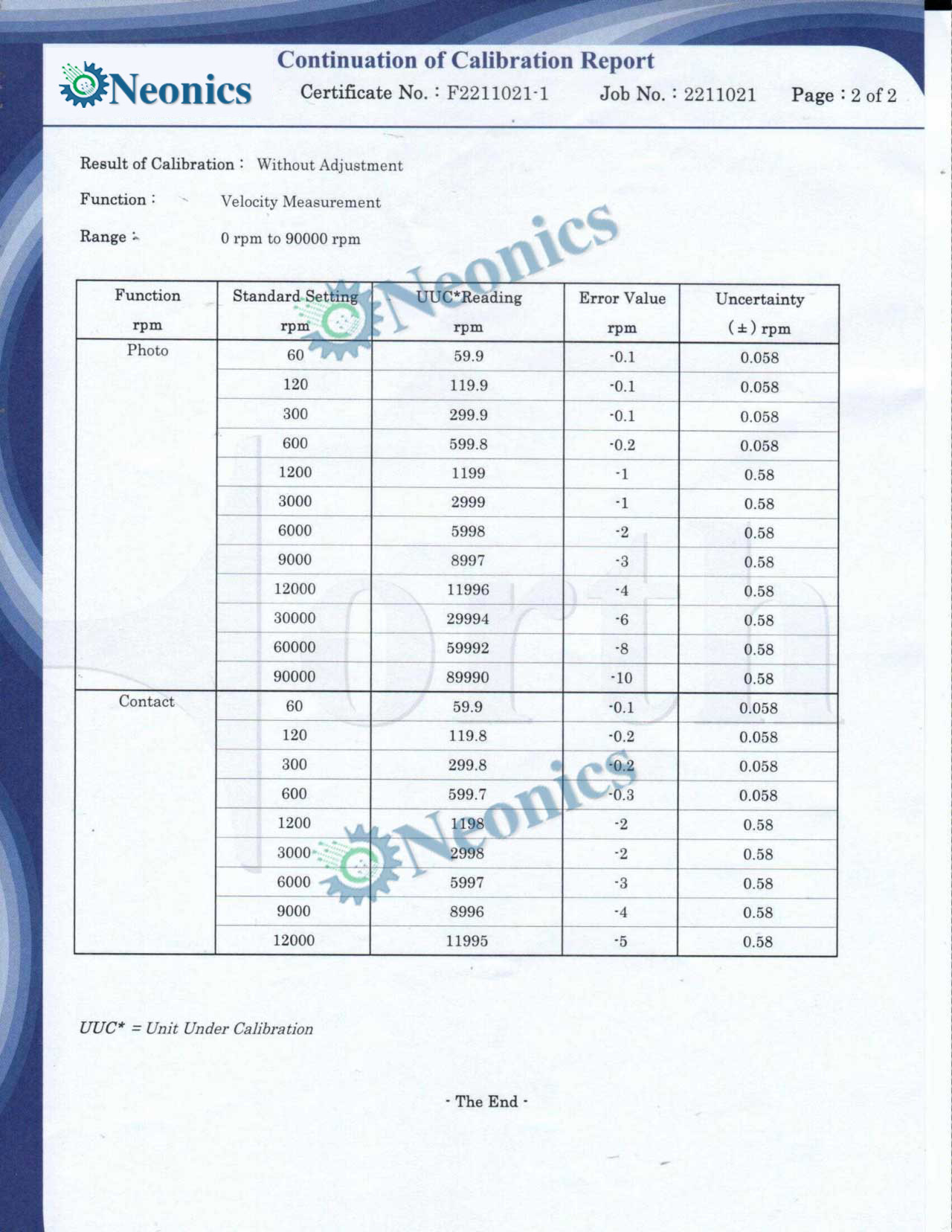
เครื่องมือวัดทุกชนิดต้องมีความแม่นยำ ค่าตัวเลขที่แสดงบนหน้าจอต้องให้ความถูกต้องตามมาตรฐาน ดังนั้นการสอบเทียบเป็นสิ่งจำเป็น ตัวอย่างใบรับรองการสอบเทียบ Certificate of Calibration
0 Comment