
รอบต่อนาที หรือ Revolutions per minute (ตัวย่อ rpm, RPM, rev/min, r/min หรือด้วยสัญกรณ์ min-1) คือจำนวนรอบในหนึ่งนาทีเป็นหน่วยของความเร็วในการหมุนหรือความถี่ของการหมุนรอบแกนคงที่ นี่คือหน่วยที่อธิบายจำนวนครั้งที่วัตถุหมุนรอบในหนึ่งนาที วัฏจักรนี้สามารถเป็นอะไรก็ได้เช่นลูกสูบในเครื่องยนต์สันดาปภายใน เคลื่อนไหวซ้ำๆ หรือกังหันลมหมุนรอบ
การหมุนต่อนาทีเป็นหัวข้อที่สำคัญโดยเฉพาะอย่างยิ่งเมื่อพูดถึงเครื่องกำเนิดไฟฟ้า เนื่องจากเครื่องกำเนิดไฟฟ้าที่หมุนด้วย RPM ที่สูงขึ้นจะผลิตพลังงานมากขึ้นสำหรับปริมาณพลังงานเท่ากันในแต่ละรอบ โดยทั่วไปจะสะดวกที่จะทำให้ RPM ของเครื่องกำเนิดไฟฟ้าตรงกับความถี่ของกริดไฟฟ้า (หรือหลายความถี่นั้น) แม้ว่าความถี่กริดมักจะวัดเป็นเฮิรตซ์ (Hz) แทนที่จะเป็น RPM (การแปลงที่มีประโยชน์สองแบบ: 1 RPM = 0.02 Hz และ 50 RPM = 1 Hz )
ระบบหน่วยสากล (International System of Units)
ตามระบบสากลของหน่วย (SI) รอบต่อนาทีไม่ใช่หน่วย เนื่องจากคำว่า Revolution เป็นคำอธิบายประกอบเชิงความหมายมากกว่าที่จะเป็นหน่วย เนื่องจากปริมาณทางกายภาพที่วัดได้เครื่องหมายสูตรจึงต้องเป็น f สำหรับความถี่ (การหมุน) และ ω หรือ Ω สำหรับความเร็วเชิงมุม หน่วยที่ได้รับ SI พื้นฐานที่สอดคล้องกันคือ s-1 หรือ Hz เมื่อวัดความเร็วเชิงมุม หน่วยเรเดียนต่อวินาที
เครื่องวัดความเร็วรอบ RPM
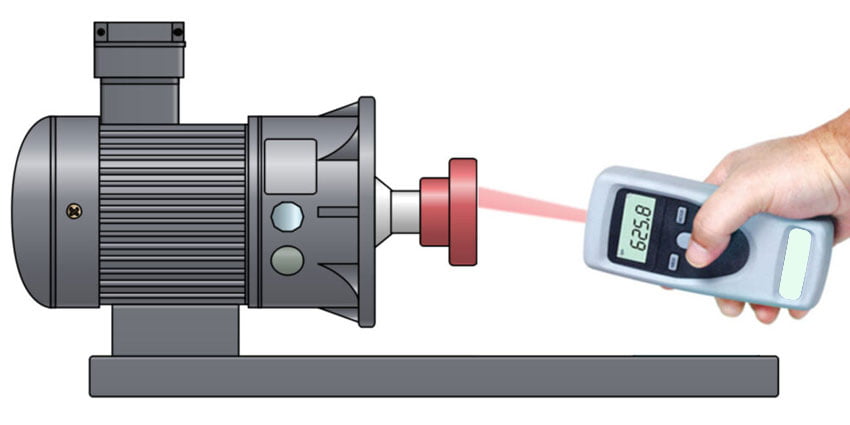
เครื่องวัดวามเร็วรอบหรือในภาษาอังกฤษเรียกว่า Tachometer คือเครื่องมือที่ใช้วัดความเร็วในการหมุนของเพลาหรือดิสก์ ออกแบบมาเพื่อวัดรอบต่อนาที (RPM) ของวัตถุที่กำลังเคลื่อนที่ มักใช้ในมอเตอร์และเครื่องจักรอื่นๆ และพบได้ทั่วไปในอุตสาหกรรมยานยนต์และการบิน
จุดประสงค์ของการวัดวามเร็วรอบคือการวัดความเร็วในการหมุนของเครื่อง ตัวอย่างเช่น ภายในอุตสาหกรรมยานยนต์ มาตรวัดความเร็วรอบมักจะแสดงบนแผงหน้าปัดของรถ ซึ่งจะแจ้งให้ผู้ขับขี่ทราบเมื่อต้องเปลี่ยนเกียร์โดยคำนึงถึงความเร็วในการหมุนของเพลาด้วย
อุปกรณ์วัดวามเร็วรอบสามารถใช้วัดวัตถุและตัวชี้วัดประสิทธิภาพได้หลากหลาย รวมไปถึง:
- 1) ความเร็วในการหมุน (เช่น ล้อหรือลูกกลิ้ง มอเตอร์ เพลา พัดลม หรือกังหัน) ในหน่วย RPM
- 2) ความเร็วในการเดินทาง (เช่น สายพานลำเลียง) ในหน่วยเมตรต่อนาที (m/min)
ประเภทของเครื่องวัดวามเร็ว
เครื่องวัดวามเร็วมีหลายประเภท แต่ละประเภทเหมาะสมที่สุดสำหรับการใช้งานและการใช้งานที่แตกต่างกัน นอกเหนือจากเครื่องวัดความเร็วรอบแบบอิเล็กทรอนิกส์และแบบเครื่องกล ตามที่ได้อธิบายไว้ข้างต้นแล้ว ทั้งสองประเภทหลักคือเครื่องวัดความเร็วรอบแบบสัมผัสและแบบไม่สัมผัส






อุปกรณ์วัดความเร็วรอบรุ่นแนะนำ

AR926 เครื่องวัดความเร็วรอบ Non-contact Tachometer แบรนด์ SmartSensor
AR926 เเบรนด์ SmartSensor (Non-contact Tachometer) แสดงผลดิจิตอลที่มีประสิทธิภาพสูง สามารถวัดค่าความเร็วรอบในการหมุนที่แน่นอนผ่านกระบวนการสุ่มตัวอย่างแสงสะท้อน
- 1) ช่วงการวัด 2.5~99999RPM
- 2) ระยะการวัด 50mm~500mm
- 3) ความแม่นยำ ±(0.05% +1 หลัก )
- 4) เวลาสุ่มตัวอย่าง 0.8 วินาที

AR925 Contact Tachometer SmartSensor เครื่องวัดความเร็วรอบแบบสัมผัส
AR925 วัดความเร็วรอบได้ 3 หน่วยได้แก่ RPM, m/min, ft/min ใช้เพื่อตรวจจับความเร็วในการหมุน, ความเร็วเชิงเส้นหรือความถี่ของมอเตอร์ มีขนาดกะทัดรัดและมีชิปประมวลผลความเร็วสูง ตัวเครื่องผลิตจากพลาสติกคุณภาพสูงทนทานต่อแรงกระแทก สินค้าคุณภาพสูง ขายราคาถูก จัดส่งทั่วไทย
- 1) ช่วงการวัด 0.5~19999RPM และ 0.05~19999.9 เมตร/นาที
- 2) ความละเอียด 0.1 รอบต่อนาที (0.5 ~ 999.9 รอบต่อนาที)
- 3) ความแม่นยำ ±(0.05%)
- 4) ความถี่ในการสุ่มตัวอย่าง 0.8 วินาที
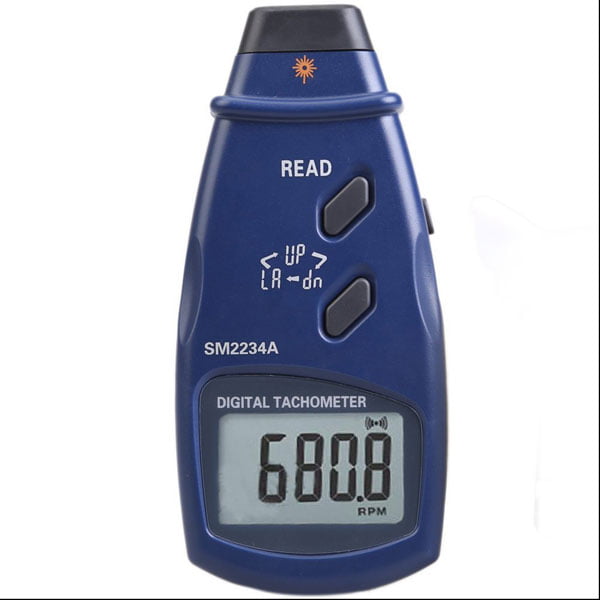
เครื่องวัดความเร็วรอบ SM2234A
SM2234A Non-contact Tachometer สำหรับวัดความเร็วรอบมอเตอร์ชนิดไม่สัมผัส แสดงผลดิจิตอลที่มีประสิทธิภาพสูง เหมาะกับการนำไปใช้ในงานวัดความเร็วรอบแบบไม่สัมผัสเช่นวัดความเร็วรอบของมอเตอร์ Generator
- 1) ช่วงทดสอบ: 2.5 – 99999RPM (รอบ/นาที )
- 2) ความละเอียด: 0.1RPM
- 3) ความแม่นยำ: น้อยกว่าหรือบวก 0.05
- 4) ช่วงการตรวจจับ: 50 – 500mm

SM6236E อุปกรณ์วัดความเร็วรอบแบบ 2IN1 Contact and Non-contact Tachometer
SM6236E วัดความเร็วรอบเป็นได้ทั้งแบบสัมผัสกับชิ้นงานและไม่สัมผัส (Contact and Non-contact Tachometer) แสดงผลดิจิตอลที่มีประสิทธิภาพสูง
- 1) ความแม่นยำ: ±(0.05%)
- 2) ระยะตรวจจับ: 50 ถึง 500mm
- 3) ช่วงการวัด: 2.5 ถึง 99,999RPM ความเร็วพื้นผิว: 0.05 ถึง 1,999.9 เมตร/นาที
หาสินค้าทั้งหมดดูรายละเอียดสินค้า”เครื่องวัดความเร็วรอบ Tachometer“
ความแม่นยำ
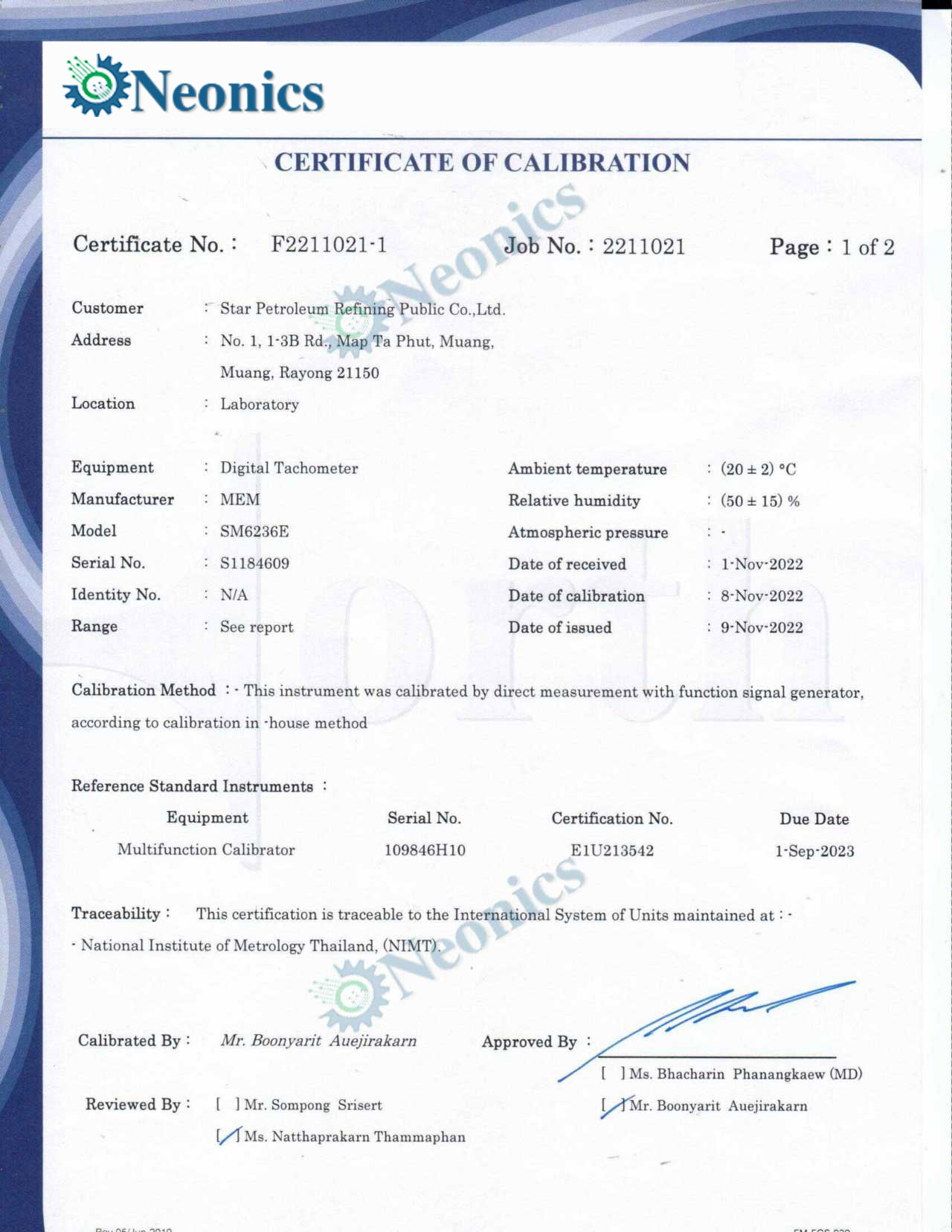
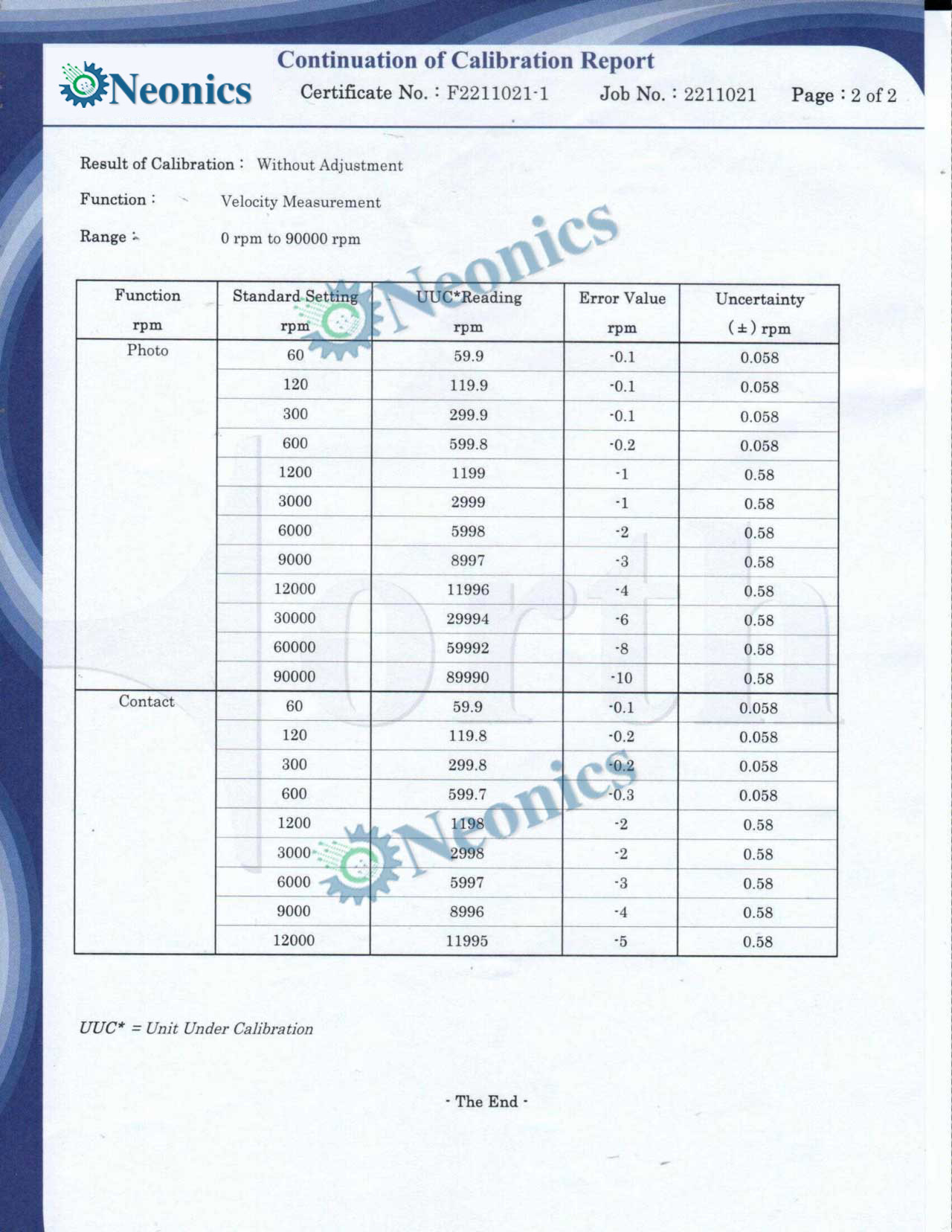
เครื่องมือวัดทุกชนิดต้องมีความแม่นยำ ค่าตัวเลขที่แสดงบนหน้าจอต้องให้ความถูกต้องตามมาตรฐาน ดังนั้นการสอบเทียบเป็นสิ่งจำเป็น ตัวอย่างใบรับรองการสอบเทียบ Certificate of Calibration
0 Comment